|

|
electrical Plane (ePlane) |
Tags |
|||
|
electrical pLane Software tools for electrical aircraft design The models are enabling issue identification much sooner in the process and significantly reduces the time required for each iterative cycle.
Lane (plattform 2.xxx) The program "ePlane" includes a variety variants of e-planes, electrical engines, aerodynamics and flight paths. The development of flight dynamics models is a key aspect of the electrical aircraft design process. The basic modeling core "Lane" is to construct e-aircraft models around a dynamics motion equations of a flight vehicles. Particular attention is given to mathematical models and techniques for analysis of aircrafts. Product Description The software enables aircraft specialists from all disciplines to work in a collaborative environment on a quickly modeling and simulation solution. The research and modelling components are based on mathematical models and techniques for analysis, simulation, and evaluation of flying qualities. The quickly modeling help to reduce mistakes and the need for rework and significantly reduces the time required for pre-design cycle. Program ePLane 2.xxx (platform 2.xxx):
|
| |||


Report Example
NOMENCLATURE
Subscripts
bat Battery
f Flight
o Start
e End
Symbols
a Speed of sound
AR Aspect ratio
Cd Total drag coefficient
Cdo Parasite drag coefficient
Cdi Induced drag coefficient
Cl Lift Coefficient
D Drag force
dt Integration step
E Energy
Ek Kinetic energy
Ep Potential energy
e Oswald’s efficiency factor; Lift-to-Drag ratio
F Force
f Friction coefficient
g Acceleration due to gravity
H Height, flight level, operating altitude
L Lift force, Takeoff field length
Lw Wing loading
M Mach number
m Weight
n Load factor
P Power; Pressure
q Dynamic pressure; Heat flow
R Range
Re Reynolds number
r Radius
S Wing area
T Thrust; Temperature
t Time
x Horizontal distance
V Flight speed; Volume
α Angle of attack
ε Aerodynamic Efficiency
γ Flight path angle
η Energy efficiency
ρ Density
Acronyms and Abbreviations
AIAA The American Institute of Aeronautics and Astronautics
FAR Federal Aviation Regulations
FL Flight Level
FC Fuel Cell
HAP High Altitude Platform
HTA Heavier Than Air
ICAO International Civil Aviation Organization
ISA International Standard Atmosphere
JAR Joint Airworthiness Regulations
LTA Lighter Than Air
MTOW Maximum Takeoff Weight
PI Performance index
TOFL Takeoff Field Length
SFC Specific Fuel Consumption
UAV Unmanned Aerial Vehicle

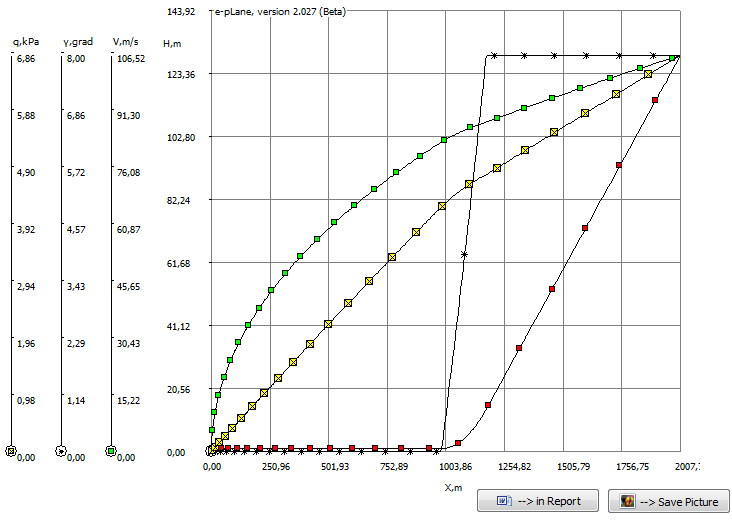
Mission profile
Initial Conditions
Weight, m0,(MTOW), kg = 50900
Area (S), m2 = 106,1
Angle (γo), grad = 8
Height (Ho), m = 1
Velocity (Vo), m/s = 1
Flight Speed (Vf), m/s = 134,7
Flight Altitude (Hf), m = 3000
Integration Step, s = 0,01
Aerodynamic Characteristics
ε = Cl / Cd (max) = 32
Start
Cl (max) = 1,6
Cdo = 0,016
deltaCd = 0
Aspect Ratio (wing), AR = 14,1
Oswald"s efficiency factor = 0,88
γ, deg = 8
Flight
Cl (max) = 1,3
Cdo = 0,00996
deltaCd = 0
Aspect Ratio (wing), AR = 14,1
Oswald"s efficiency factor = 0,933
Landing
Cl (max) = 3
Cdo = 0,06
deltaCd = 0
Aspect Ratio (wing), AR = 14,1
Oswald"s efficiency factor = 0,83
γ, deg = -3


Aerodynamic polars Cl=f(Cd)
Results of calculation
Range, m
Endurance, s
Wing Loading, kg/m2
Start
Speed at take-off, Vs, m/s
Speed at take-off (+20%), m/s
Rolling friction coefficient, f
Take-off Field Length (TOFL), xs, m
Time to climb, ta,
Flight
Thrust (F), N
Velocity (Vo), m/s
Landing
Airplane descent, xd, m
Glide angle γ (εmax),
Minimum speed, Vlmin, m/s
Minimum speed*1,3, m/s
Rolling friction coefficient,
Landing Field Length (LFL), xl,
Propulsion system
Thrust (max) (F), N
Thrust / MTOW
Specific energy , (E), Wh/kg
Energy efficiency (System), η
Battery weight, mbat, kg
Battery weight (mbat/m0), %